Jakie są przyczyny powstawania synergii ruchowych kończyny górnej?
Zróżnicowanie funkcji między obręczą barkową i miedniczną jest już wyraźnie widoczne u czworonożnych ssaków.
Z reguły kończyny przednie mają bardziej zróżnicowane funkcje związane z samoobsługą (ryc. 1-A), co wyraża się możliwością wykonywania ruchów związanych z utrzymaniem czystości ciała zwierzęcia (mycie, funkcje higieniczne), a także aktywnościami związanymi z obroną i atakiem (ryc. 1-B).
Są one znacznie silniejsze niż kończyny tylne i w dużej mierze zależą od pozycji głowy w przestrzeni (również pod względem siły), to znaczy od tonicznego odruchu błędnikowego, a także od odruchów nastawczych.
Niemniej jednak oczywiste jest, że zarówno przednia, jak i tylna para kończyn zwierzęcia odpowiadają za zapewnienie funkcji lokomotorycznych i statycznych.
Ryc. 1. Zróżnicowanie funkcji kończyn przednich i tylnych u czworonogów:
A – ruchy związane z samoobsługą i czynnościami higienicznymi;
B – ruchy podczas obrony i ataku
Także u ludzi echa diagonalnego stereotypu poruszania się ssaków czworonożnych są wyraźnie zaznaczone w postaci zsynchronizowanych, naprzemiennych ruchów ramion wykonywanych podczas chodzenia.
Głównym zadaniem kończyny górnej człowieka (a przede wszystkim ręki) jest różnorodne manipulowanie przedmiotami. Powszechnie jednak wiadomo, że w procesie filogenezy funkcji motorycznych starsze odruchy nie zanikają, lecz dostosowują się do nowych warunków lub integrują w hierarchicznie młodszą synergię ruchową.
Wraz z tym procesem, który moglibyśmy nazwać nadbudową neuronalną zachodzącą na poziomie ośrodkowego układu nerwowego (OUN), dochodzi do rozwoju całkowicie nowych klas ruchów2. W takiej sytuacji naiwnością byłoby wierzyć, że pierwotne doświadczenie lokomotoryczne ludzkiej kończyny górnej nie jest w żaden sposób wykorzystywane w jej nowych funkcjach manualnych.
N.K. Bogolepow3 opisał mimowolne ruchy niedowładnej kończyny górnej u pacjentów po udarze w odpowiedzi na podrażnienia bólowe. W swojej złożoności przypominają one naturalne akty motoryczne. Niektóre z nich można równie dobrze porównać do poszczególnych elementów kroku.
Przy ukłuciu igłą okolicy stawu barkowego (ryc. 2-A) lub gdy mięśnie zdrowej kończyny górnej (kończyny pośrednio zajętej – przyp. red.) są aktywnie napięte (ryc. 2-B), może pojawić się reakcja motoryczna przypominająca fazę zgięciową kroku, w postaci przywiedzenia ramienia, zgięcia i pronacji przedramienia oraz zgięcia ręki.
Czasami analogiczny wyzwalacz (ryc. 2-B, D) inicjuje przywiedzenie i ruch ramienia ku przodowi, wyprost i pronację przedramienia oraz wyprost lub zgięcie ręki (wyprostna faza kroku).
Podobieństwo do aktu lokomocji staje się jeszcze większe, gdy można wywołać skoordynowany odruch w przeciwległej kończynie górnej i dolnej.
Na przykład aktywne zgięcie władnej (pośrednio zajętej) kończyny dolnej sprzyja mimowolnemu zgięciu przeciwległego ramienia (ryc. 2-E).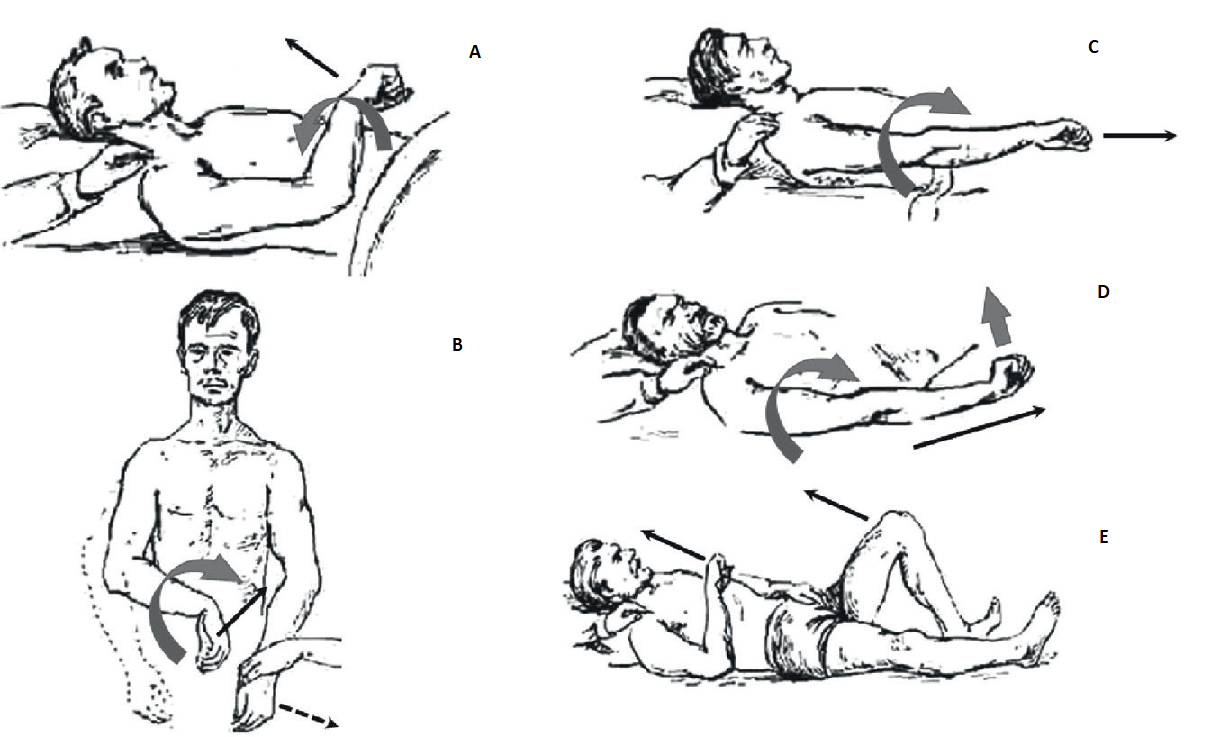
Ryc. 2. Przejawy odruchów w kończynie górnej u pacjentów po udarze mózgu w odpowiedzi na stymulację zewnętrzną (oznaczenia według N.K. Bogolepowa):
A –, C –, D – przywiedzenie (zgięcie) barku, zgięcie (wyprost) i pronacja przedramienia, a także zgięcie (wyprost) ręki w odpowiedzi na stymulację igłą okolicy stawu barkowego; B – przywiedzenie ramienia, zgięcie i pronacja przedramienia w odpowiedzi na napięcie mięśni władnego ramienia (pośrednio zajętego);
E – aktywne zginanie władnej (pośrednio zajętej) kończyny dolnej przyczynia się do mimowolnego zgięcia przeciwnego ramienia
Oczywiście, wraz z utratą kontroli korowej, dawne synergie statyczne i lokomotoryczne ramienia na poziomie pnia mózgu znów uzyskują dominujący wpływ.
R. Wartenberg5 uznał obecność synkinezji przeciwnej kończyny górnej i dolnej za wiarygodny objaw zaburzenia piramidowego.
Dawno zauważono, że w przypadku hemiplegii powstałej w wyniku ogniska chorobowego na poziomie torebki wewnętrznej (capsula interna) (ryc. 3-B), kiedy wpływ korowych ośrodków piramidowych prawie całkowicie jest niedostępny, w kończynie górnej zaczyna dominować tonus zgięciowy, a w kończynie dolnej tonus wyprostny (postawa Wernickego-Manna).
W typowych przypadkach (ryc. 3-A) ramię jest uniesione, przedramię jest skoślawione i zgięte w łokciu pod kątem prostym lub ostrym, natomiast ręka i palce są zgięte; biodro ustawia się w przywiedzeniu, podudzie w wyproście, a stopa w pozycji zgięcia podeszwowego.
Wśród neurologów utrwaliła się opinia M.I. Astwacaturowa (1922), zgodnie z którą mechanizmy przykurczu kończyny górnej i dolnej w przypadku porażenia połowiczego wywodzą się z różnych stadiów rozwoju filogenetycznego: funkcja chwytania manifestuje się w kończynie górnej, natomiast funkcja podporowa w obrębie kończyny dolnej3, 8.
Należy zwrócić uwagę, że ustawienie kończyny górnej w przywiedzeniu i pronacji jest wyjątkowo niewygodne przy chwytaniu przedmiotów.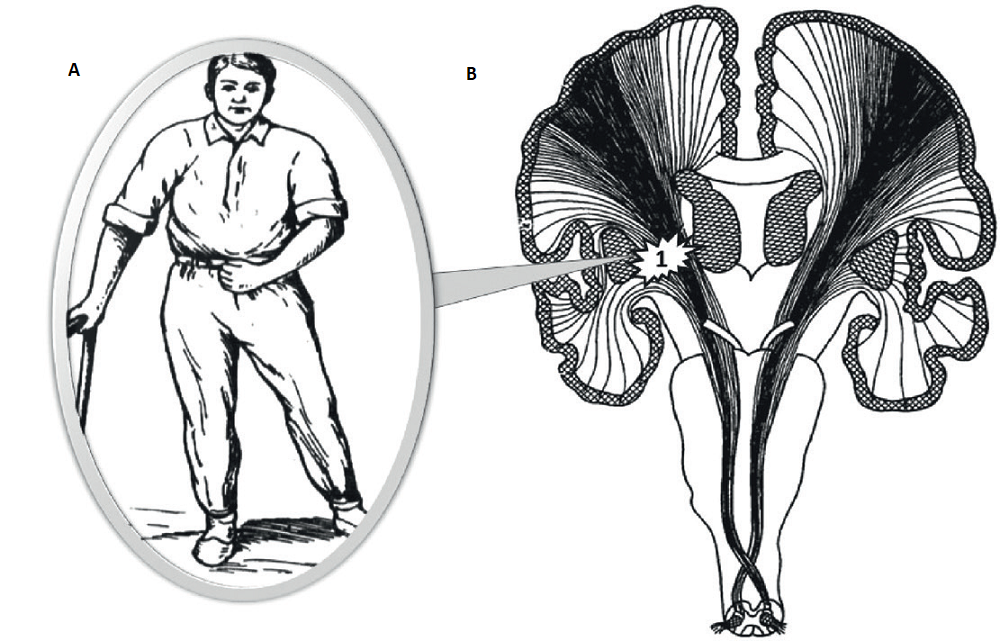
Ryc. 3. Hemiplegia w przypadku uszkodzenia torebki wewnętrznej (capsula interna) – całkowite rozłączenie szlaków sensomotorycznych kory z charakterystycznymi zmianami patologicznymi w obrębie kończyn po przeciwnej stronie względem ogniska: A – typowa sylwetka Wernickego-Manna; B – lokalizacja zmiany (1) w obszarze torebki wewnętrznej
Z drugiej strony pronacja przedramienia jest jedyną możliwą pozycją, w której kończyna mogłaby wykonywać funkcje lokomocyjno-podporowe.
Można założyć, że postawa hemiplegiczna odzwierciedla patologiczną stabilizację fazy zgięciowej kroku na kończynie górnej i wyprostnej w dolnej.
W.A. Liechtenstein8 dostrzegał w pozycji Wernickego-Manna podobieństwo do określonej fazy biegu (ryc. 4-A, B). Rzeczywiście, w przypadku lokomocji typu diagonalnego (ryc. 4-B) jedna z kończyn homolateralnych powinna być zgięta (na przykład ramię), a druga wyprostowana (kontralateralna kończyna dolna).
Warto zauważyć, że u dzieci z porażeniem mózgowym, które, jak wiadomo, charakteryzują się opóźnieniem lub zaburzeniem rozwoju funkcji statyczno-ruchowych, nie występuje klasyczny przykurcz Wernickego-Manna (ryc. 4-C, D)4, 12.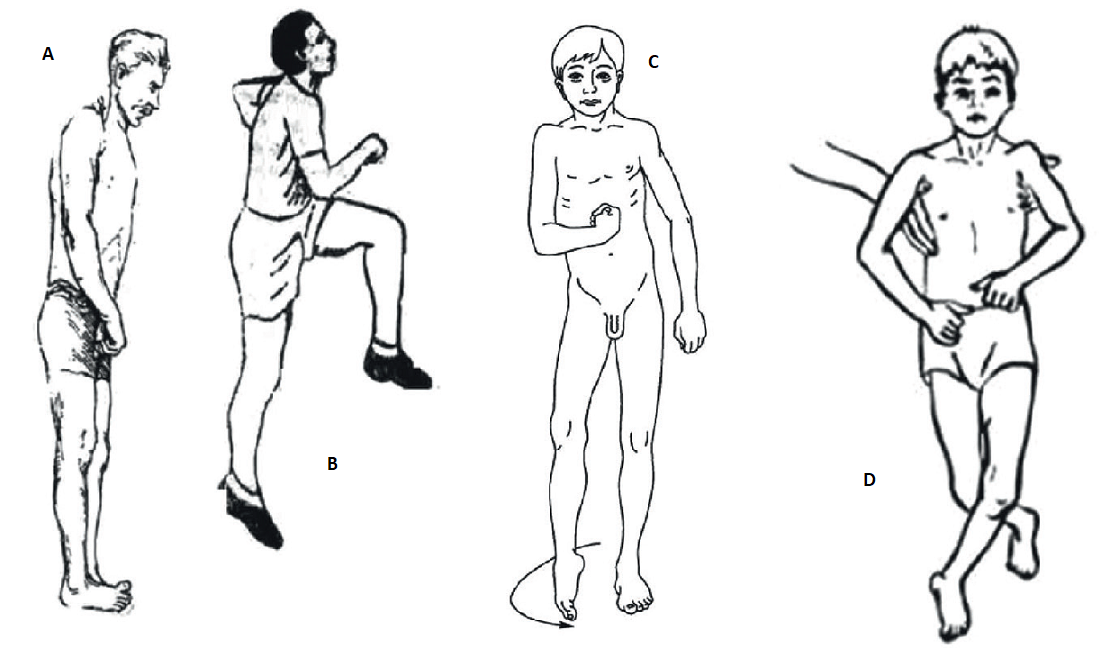
Ryc. 4. Synergizmy kończyny górnej i dolnej po stronie porażenia połowiczego podczas chodzenia:
A – pacjent z porażeniem połowiczym (hemiparezą); B – człowiek w trakcie biegu; C – typowa sylwetka Wernickego-Manna u dziecka z pourodzeniowym porażeniem dróg piramidowych; D – typowa postawa u dziecka z przedurodzeniowymi uszkodzeniami ośrodkowego układu nerwowego: zarówno w kończynach górnych, jak i dolnych dominuje napięcie zginaczy
Pomimo oczywistych dowodów na to, że spastyczne ustawienie niedowładnej kończyny górnej odzwierciedla jedną z faz kroku, nadal pozostaje niejasna kwestia, dlaczego w danym przypadku zgięcie przedramienia przeważa nad wyprostem.
Wiadomo, że lokomocja odbywa się dzięki "występującemu w tle" tonicznemu napięciu statycznemu. Z kolei synergizmy posturalne integrują w sobie toniczne odruchy szyjne i błędnikowe.
U czworonożnych zwierząt tułów jest zwykle ustawiony równolegle do płaszczyzny podparcia, przy czym w celu utrzymania naturalnej pozycji głowy w pośredniej pozycji fizjologicznej (gdy otwór jamy ustnej ustawiony jest poziomo1) szyja silnie odchyla się do tyłu, tworząc kąt wklęsły względem kręgosłupa (ryc. 5-A).
Wyprost szyi jeszcze bardziej wzmacnia toniczne napięcie prostowników szczególnie w obszarze przednich łap (toniczny odruch szyjny1).
U człowieka w stojącej pozycji pionowej szyja znajduje się niemalże w przedłużeniu głównej osi ciała (ryc. 5-B). Z tego powodu wyprostny toniczny odruch szyjny w tym przypadku nie jest zaznaczony, a w kończynach górnych dominuje tendencja zgięciowego ustawienia statycznego.
W analogiczny sposób wyszkolony pies stojący na tylnych łapach w pozie służenia zgina kończyny przednie (ryc. 5-B).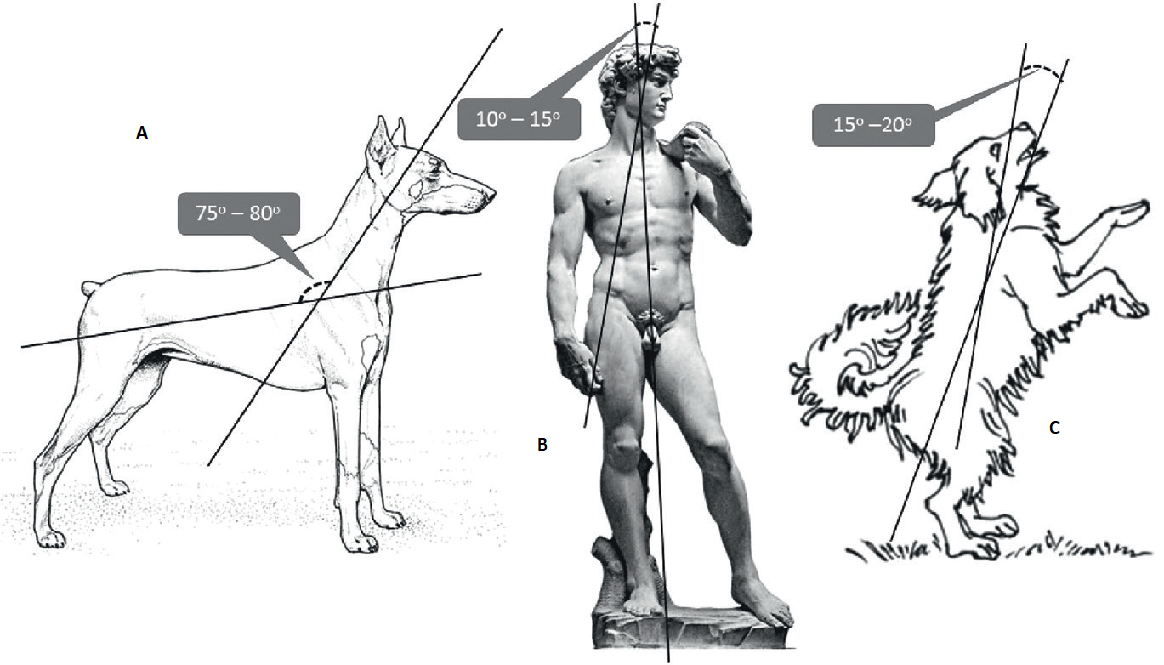
Ryc. 5. Charakter napięcia mięśniowego kończyn przednich (górnych) w zależności od stopnia wyprostu szyi: A – przy czworonożnej pozycji stojącej szyja jest odchylona do tyłu – przednie kończyny nie są zgięte; B –, C – w dwunożnej pozycji stojącej szyja znajduje się prawie w tej samej płaszczyźnie co reszta ciała, a przednie (górne) kończyny są zgięte
Prawdopodobnie opisany mechanizm przyczynia się do tego, że przy sztywności odmóżdżeniowej u ludzi, w przeciwieństwie do zwierząt, dominuje ustawienie zgięciowe kończyny górnej.
Przytoczone fakty i uzasadnienia, po pierwsze, pozwalają stwierdzić, że znaczna część synergii motorycznych kończyny górnej współczesnego człowieka wywodzi się z jej funkcji lokomotorycznej i związana jest z odrębnymi fazami kroku, a po drugie, przy postawie pionowej cała kończyna górna znajduje się pod wpływem statycznego napięcia zgięciowego i pronacyjnego związanego z tonicznym odruchem szyjnym.
Opisana grupa reakcji motorycznych może być nazwana synergizmem lokomotorycznym kończyny górnej i, jak się wydaje, wywodzi się on z poziomu śródmózgowia (ryc. 6-A).
Oprócz odruchów związanych filogenetycznie z funkcją chodu istnieje także inny rodzaj ruchu kończyny górnej.
Reakcję chwytną ręki można obserwować u trzymiesięcznego zarodka ludzkiego12. Ośrodki tej reakcji znajdują się w rdzeniu przedłużonym i w górnych segmentach szyjnych6,12.
W drugim miesiącu okresu poporodowego odruch chwytny Robinsona zostaje zintegrowany z ruchem ręka-usta. Uciśnięcie kłębu kciuka powoduje otwarcie ust, pochylenie głowy i zamknięcie oczu niemowlęcia11.
W miarę dojrzewania korowego analizatora wzrokowego w ciągu 3–4 miesięcy reakcja ręka-usta przekształca się z reakcji czysto kinestetycznej w reakcję wzrokowo-ruchową. Teraz dziecko chwyta wszystkie obiekty, które widzi, i wkłada je do ust.
Grupę synergii ruchowych umożliwiającą chwytanie obiektu i wkładanie go do ust można nazwać właściwymi (własnymi) synergiami manualnymi ręki.
Analiza niektórych stanów patologicznych sugeruje, że ich najwyższy ośrodek znajduje się w polu przedruchowym płatów czołowych (ryc. 6-A)6.
W przeciwieństwie do synergizmów lokomotorycznych we właściwych synergiach manualnych pojawiają się ruchy odwiedzenia ramienia i pełnej supinacji przedramienia, które nie są charakterystyczne dla zwierząt czworonożnych (ryc. 6-B, C).
Innym ważnym źródłem do badania synergii ruchowych kończyny górnej mogą być obserwacje psychologów zajmujących się behawioryzmem10. Uzyskane wyniki obserwacji wskazują, że liczba gestów komunikacji niewerbalnej jest nieduża, a wiele z nich jest charakterystycznych nie tylko dla ludzi wszystkich ras i narodowości, lecz także dla naszych najbliższych krewnych – małp człekokształtnych.
W analizie gestów można wyraźnie wyróżnić ruchy pochodzące od synergii lokomotorycznych, jak i od właściwych synergii manualnych9.
Na przykład gesty "żegnaj", "do widzenia" (machanie ręką) i "OK" (podniesiona ręka, kciuk styka się z palcem wskazującym) odzwierciedlają fazę zgięciową kroku, a gest przywitania – uścisk ręki – pierwszą fazę wyprostną chodu. Wszystkie te ekspresyjne ruchy charakteryzują się przywodzeniem ramienia i pronacją przedramienia.
Z drugiej strony gesty "nie wiem" (rozłożone ręce) i "wypadło mi z głowy" (dotknięcie dłonią czoła) związane są z określonymi, właściwymi synergiami manualnymi.
Jest oczywiste, że położenie supinacyjne kończyny górnej oraz odwiedzenie nie mogą w żaden sposób zapewnić podparcia w pozycji stojącej.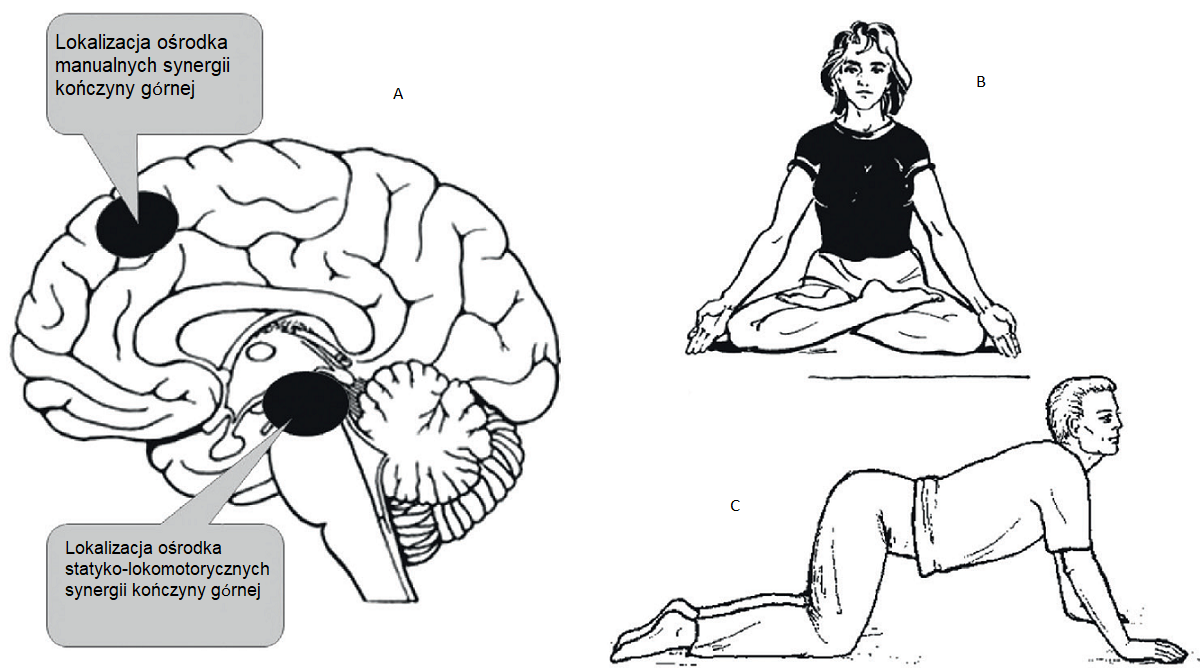
Ryc. 6. Różnice pomiędzy wykorzystaniem kończyn górnych w celach lokomotorycznych i czysto manualnych: A – lokalizacja ośrodków synergii lokomotorycznych i manualnych kończyny górnej; B – odwiedzenie i supinacja – typowa pozycja kończyn górnych osoby z adekwatnymi synergiami manualnymi; C – przywiedzenie i pronacja – typowa pozycja kończyn górnych człowieka w przypadku synergii ruchowej (lokomotorycznej)
Jakie synergie ruchowe kończyny górnej możemy wyróżnić?
Dokonany przegląd danych literaturowych pozwala wyróżnić sześć głównych synergii, które – jak się zdaje – są wystarczające do opisania całej różnorodności funkcji kończyny górnej (ewentualnie z pewnymi wyjątkami drobnych, precyzyjnych ruchów ręki i palców).
Cztery z nich wywodzą się z funkcji lokomotorycznej, a pozostałe dwie są z właściwych synergii manualnych ręki. Charakter tych synergii ruchowych został opisany poniżej.
1. Lokomotoryczny synergizm zgięciowy
Lokomotoryczny synergizm zgięciowy (ryc. 7-A) jest analogiem zgięcia w fazie przenoszenia cyklu chodu (ryc. 7-A-1).
Charakteryzuje się wyprostem ramienia z niewielkiego stopnia odwiedzeniem i rotacją wewnętrzną oraz zgięciem i pronacją przedramienia.
Ręka przyjmuje położenie zgięcia grzbietowego, natomiast strona dłoniowa jest skierowana do przodu, palce są zgięte lub zaciśnięte w pięść.
Łopatka jest przywiedziona w kierunku linii pośrodkowej oraz znajduje się w elewacji. Głowa ustawiona jest w delikatnej rotacji i lekko przechylona na bok (jako pozostałość asymetrycznego tonicznego odruchu szyjnego). Ruch ten przypomina gest powitania.
2. Pierwszy lokomotoryczny synergizm prostowników
Pierwszy lokomotoryczny synergizm prostowników (ryc. 7-B) jest analogiem wyprostu w fazie przenoszenia cyklu chodu (ryc. 7-B-1).
Charakteryzuje się wyprostem, rotacją wewnętrzną i przywiedzeniem ramienia; pronacją przedramienia, zgięciem grzbietowym ręki; strona dłoniowa jest skierowana do przodu, paliczki proksymalne palców znajdują się w zgięciu, natomiast środkowe i dystalne są zgięte; głowa jest przechylona i obrócona w tę samą stronę.
3. Drugi lokomotoryczny synergizm prostowników
Drugi lokomotoryczny synergizm prostowników (ryc. 7-C) jest analogiem środka fazy przenoszenia w cyklu chodu (ryc. 7-C-1).
Charakteryzuje się on zgięciem ramienia tuż poniżej linii poziomej z równoczesnym przywiedzeniem i rotacją wewnętrzną oraz wyprostem i pronacją przedramienia, jak również zgięciem ręki, przy czym paliczki proksymalne są wyprostowane, a środkowe paliczki zgięte.
Taką pozycję ręki można zaobserwować, kiedy ktoś popycha przed sobą wózek lub opiera się o ścianę wyciągniętą do przodu ręką.
4. Trzeci lokomotoryczny synergizm prostowników
Trzeci lokomotoryczny synergizm prostowników (ryc. 7-D) jest analogiem końcowej fazy wyprostnej przenoszenia w cyklu chodu (ryc. 7-D-1).
Charakteryzuje się wyprostem i maksymalną rotacją wewnętrzną ramienia oraz wyprostem i pronacją przedramienia; ręka znajduje się w zgięciu grzbietowym; paliczki proksymalne wyprostowane, natomiast środkowe i dystalne – zgięte.
Taka pozycja ręki może zostać zaobserwowana, gdy osoba odpycha się ręką od znajdującej się za jej plecami ściany.
5. Właściwa manualna synergia prostowników
Właściwa manualna synergia prostowników (ryc. 7-E). Charakteryzuje się odwiedzeniem, wyprostem i rotacją zewnętrzną ramienia; wyprostem i supinacją przedramienia, wyprostem ręki i palców oraz odwiedzeniem pierwszego palca (kciuka).
Gest przypomina ruch ręki artysty podczas ukłonu po występie.
6. Właściwa zgięciowa synergia manualna
Właściwa zgięciowa synergia manualna (ryc. 7-F). Charakteryzuje się wyprostem i niewielkim odwiedzeniem ramienia, a także zgięciem i supinacją przedramienia, zgięciem palców, przywiedzeniem kciuka.
Ten gest przypomina podniesienie ręki do ust z jabłkiem zaciśniętym w dłoni.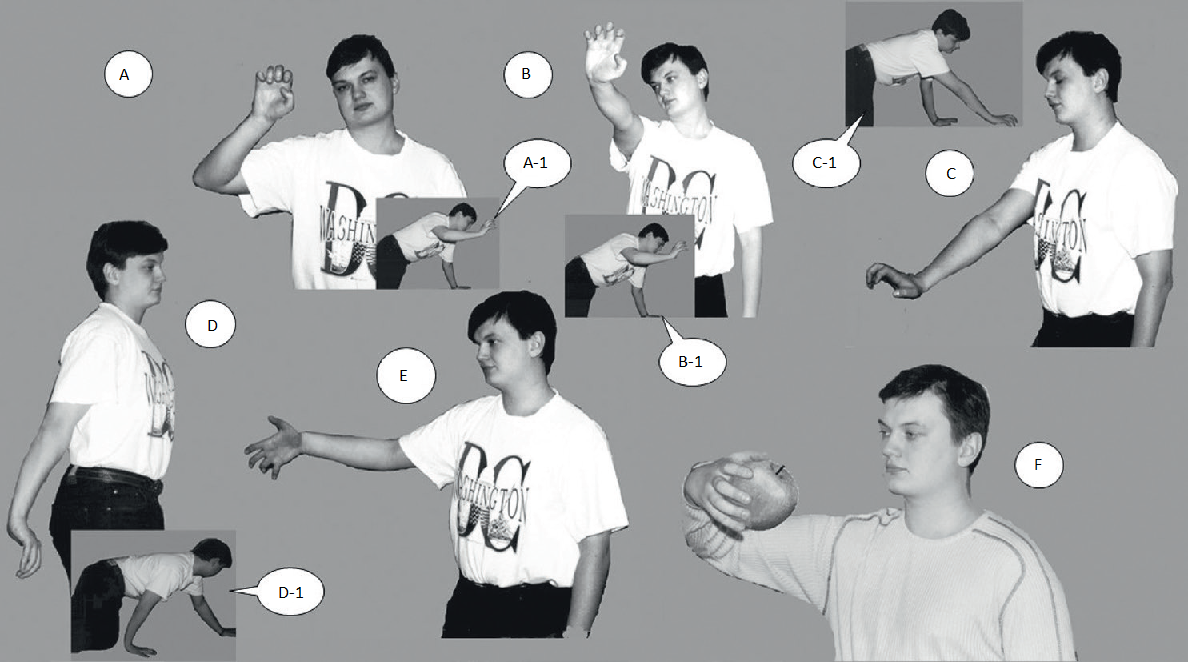
Ryc. 7. Główne synergie ruchowe ludzkiej kończyny górnej: A – lokomotoryczna synergia zgięciowa jest analogiem zgięcia w fazie przenoszenia chodu (A-1); B – pierwsza lokomotoryczna synergia wyprostna jest analogiem odbicia przedniego (odepchnięcia ku przodowi) (B-1); C – druga lokomotoryczna synergia wyprostna jest analogiem środka fazy podporu podczas chodu (C-1); D – trzecia synergia ruchowa prostowników jest analogiem odbicia tylnego (odepchnięcia ku tyłowi) (D-1); E – właściwa manualna synergia prostowników; F – właściwa manualna synergia zginaczy
Synergie ruchowe kończyny górnej - podsumowanie
Zlokalizowany w polach przedruchowych płatów czołowych filogenetycznie młodszy ośrodek właściwych manualnych synergii ręki jest połączony z neuronami ruchowymi rdzenia kręgowego poprzez pojedynczy pod względem funkcjonalnym i strukturalnym, a zatem bardzo wrażliwy, układ piramidalny (ryc. 6-A, ryc. 3-B).
W odróżnieniu od niego stare ośrodki śródmózgowia synergizmów statycznych i lokomotorycznych (ryc. 6-A) posiadają kilka szlaków zstępujących (droga czerwienno-rdzeniowa, pokrywowo-rdzeniowa, siatkowo-rdzeniowa, przedsionkowo-rdzeniowa itp.).
Jest oczywiste, że w przypadku uszkodzenia dróg piramidowych rzeczywiste synergie manualne ulegają zaburzeniu, a pacjent dysponuje jedynie ograniczonym zestawem synergii statycznych lokomotorycznych kończyny górnej.
Z tego powodu u pacjentów z hemiplegią po udarze najbardziej zaburzone są ruchy odwodzenia ramienia, wyprostu i supinacji przedramienia, a także wyprost palców ręki bezpośrednio zajętej.
W omawianej sytuacji ruchy przeciwne (przywodzenia ramienia, zgięcia i pronacji przedramienia, zgięcia palców) są do pewnego stopnia zachowane.
Z drugiej strony, zgodnie z zasadą A.A. Uchtomskiego13 i G.N. Kryżanowskiego7, pod wpływem impulsów obwodowych docierających z uszkodzonych struktur rdzenia i układu mięśniowo-szkieletowego w obszarach podkorowych ośrodkowego układu nerwowego oraz na wysokości pnia mózgu mogą się tworzyć trwale utrzymujące się ogniska pobudzenia prowadzące do zahamowania ośrodków korowych.
Można zatem zakładać, że podobne procesy patofizjologiczne leżą u podstaw powstawania zaburzeń tonusu mięśniowego i tworzenia się przykurczów w kończynie górnej w wyniku hemiplegii rozwijającej się po udarze mózgu.
Uważa się także, że analogiczne zmiany mogą być odpowiedzialne za zespół bolesnego barku (periarthritis humeroscapularis). Jedyne różnice polegają na tym, że w pierwszym przypadku występuje uszkodzenie strukturalno-organiczne, a w drugim – zmiana odruchowo-funkcjonalna.
- Bieritow I.S. Obszczaja fiziołogija myszecznoji nierwnoj sistiemy. 3. izd. M.: Miedicyna, 1966. T. 2: Spinnoj mozg i stwoł gołownogo mozga. 433 s.
- Biernsztiejn N.A. Oczerki po fiziołogii dwiżenij i fiziołogii aktiwnosti. M.: Miedicyna, 1966. 349 s.
- Bogolepow N.K. Naruszenija dwigatielnych funkcyj pri sosudistych porażenijach gołownogo mozga. M. :Miedgiz, 1953. 401 s.
- Bortfield S.A. Dwigatielnyje naruszenija i leczebnaja fizkultura pri dietskom ceriebralnom paralicze. Ł.: Miedicyna, 1971. 247 s.
- Wartenberg R. Diagnostic tests in neurology, Year Book Publishers, 1953. 228 s.
- Krol M.B. Niewropatołogiczeskije sindromy. Char’kow, 1933. 528 s.
- Kryżanowskij G.N. Dietierminantnyje struktury w patołogii nierwnoj sistiemy: Gienieratornyje miechanizmy niejropatołogiczeskich sindromow. M.: Miedicyna, 1980. 358 s.
- Lichtiensztiejn W.A. Suchożylnyje riefleksy u czełowieka. Machaczkała, 1968. 128 s.
- Pietrow K.B. Dwigatielnyje siniergii ruki (fiłogienieticzeskije i patogienieticzeskije aspiekty) // Manualnaja miedicyna. – 1996. – № 11. – S. 3-10 [Nowokuznieck].
- Pease A. Body Language – How to read others’ thoughts by their gestures, Sheldon Press, London. 1984.
- Siemienowa K.A. Klinika i rieabilitacyonnaja tierapija dietskich ceriebralnych paraliczej / K.A. Siemienowa, Je.M. Mastiukowa, M.Ja. Smuglin. M.: Miedicyna, 1972. 328 s.
- Siemienowa K.A. Dietskije ceriebralnyje paraliczi. M.: Miedicyna, 1968. 259 s.
- Uchtomskij A.A. Dominanta. SPB.: Pitier, 2002. 448 s.