Nawet u bardziej stabilnych zwierząt czworonożnych skuteczna kontrola postawy nie jest dużym wyzwaniem. Wyobraźmy sobie, że drapieżnik goni swoją ofiarę w pełnym galopie, a potem nagle zmienia kierunek. Zanim to zrobi, musi najpierw narzucić swój środek ciężkości na krzywą toru ruchu, poprawnie przewidując nowy wektor siły grawitacji i bezwładności, wynikający z oddziaływania siły odśrodkowej.
Ludzie również dokonują tego rodzaju regulacji postawy, zwykle bez zastanowienia. W rzeczywistości świadoma kontrola może być katastrofalna! Można by pomyśleć, że aby wymusić skręt w prawo na rowerze, kierowca po prostu obraca kierownicę w prawo. Źle! To nie jest prawdą! Obrót w prawo przesunąłby środek ciężkości w lewo, a rowerzysta szybko upadłby na ziemię.
Zamiast tego, nie zdając sobie z tego sprawy, rowerzysta najpierw obraca kierownicę na krótko w lewo, aby wytworzyć siłę odśrodkową, która porusza ciało w prawo na zamierzoną krzywą. Dopiero wówczas kieruje rowerem w prawo, gdy nowy wektor siły zrówna się z torem kontaktu kół z podłożem. Dzieci muszą nauczyć się tej regulacji postawy podczas zmiany roweru trójkołowego (w którym kierownica musi być najpierw obrócona w kierunku, w którym dziecko chce jechać) na rower dwukołowy.
System posturalny musi zatem sprostać trzem głównym wyzwaniom: musi utrzymywać stałą postawę (równowagę) w obecności grawitacji, musi generować reakcje, które przewidują ruchy ukierunkowane na konkretny cel, oraz musi być adaptacyjny.
Siła grawitacji jest stałą siłą, z którą ludzkie ciało ciągle musi się mierzyć. Istoty ludzkie z natury charakteryzują się niestabilnym systemem, z wyjątkiem sytuacji pełnego podparcia w pozycji leżącej. Nie są one w stanie stabilnej równowagi, chyba że układ sterowania działa w sposób ciągły. Utrzymanie rzutu linii działania siły ciężkości w obrębie czworoboku podparcia jest niezbędne, aby zapobiegać upadkowi.
Równowaga jest definiowana jako każdy stan, w którym wszystkie działające siły znoszą się wzajemnie, dając w rezultacie stabilny układ. Nasz układ mięśniowo-szkieletowy jest złożonym systemem różnych dźwigni, poruszających się względem poszczególnych stawów, które zapewniają im odpowiednie punkty obrotu. Utrzymanie momentu sił na ramieniu siły (wysiłku) równych siłom wzdłuż ramienia oporu jest również mechanizmem równoważącym, mającym na celu osiągnięcie stabilnej postawy.
Brak kongruencji (zborności) stawów i wiotkość więzadłowa przyczyniają się do powstania niestabilnego punktu podparcia, powodując niestabilność lub zaburzenia równowagi. Jeśli siły wewnętrzne nie są w stanie adekwatnie odpowiedzieć na przyłożone siły zewnętrzne lub pojawiające się inne siły wewnętrzne, dochodzi do zachwiania równowagi. Ćwiczenia wzmacniające, ortezy i przenoszenie (transfer) ścięgien są próbami korygowania zaburzenia sił mięśniowych działających na staw.
Kontrola posturalna - funkcje
W modelu systemów wielowymiarowych kontrola posturalna spełnia dwie główne funkcje (Horak i Macpherson, 1996):
1. Orientacja posturalna, obejmująca zarówno orientację segmentów ciała względem siebie ("postawę"), np. ustawienie tułowia nad kończynami dolnymi, głowy nad tułowiem itp., jak i orientację ciała w przestrzeni, np. jego stosunek do płaszczyzny podparcia i linii pionu oraz do zagrożeń i wyzwań występujących w otoczeniu.
2. Stabilność posturalna - uzyskiwanie i utrzymywanie stabilności, umożliwiające antycypację występowania nieoczekiwanych zmian i zakłóceń wykonywanych ruchów. Polega na utrzymywaniu środka ciężkości nad bieżącą lub oczekiwaną płaszczyzną podparcia w celu zapobiegania utracie równowagi.

Granica stabilności człowieka - co to jest?
Granica stabilności danej osoby to największa odległość w dowolnym kierunku, w którym osoba może odchylić się od linii środkowej (pionu) bez zmiany pierwotnej płaszczyzny podparcia (w wyniku zrobienia kroku, podparcia się lub upadku). Granica stabilności ma zasadnicze znaczenie dla zadań związanych z poruszaniem się, takich jak sięganie po przedmioty, przechodzenie z pozycji siedzącej do stojącej (lub ze stojącej do siedzącej) i chodzenie.
Pacjenci ze zmniejszonymi granicami stabilności w kierunku przednio-tylnym (w płaszczyźnie strzałkowej) mają tendencję do stawiania mniejszych kroków podczas chodu, natomiast ograniczenia boczne (w płaszczyźnie czołowej) mogą prowadzić do chodu na szerokiej podstawie.
Strategie kontroli posturalnej
Horak i in. zasugerowali, że rozwiązanie podwójnych wyzwań (zadań) związanych z orientacją i stabilnością wymaga od systemu kontroli posturalnej wykorzystania strategii sensorycznych, motorycznych i sensomotorycznych.
Strategia sensoryczna w przypadku osób bez zaburzeń polega na tym, że w zwykłych warunkach otoczenia informacje pochodzące ze zmysłów somatosensorycznych, układu przedsionkowego i wzrokowego są częściowo zbędne, a określenie pozycji ciała w przestrzeni jest automatyczne i rutynowe.
Jednak gdy informacje z jednego lub więcej kanałów sensorycznych są niedostępne lub zmienione (zniekształcone), w wyniku czego powstaje konflikt między zmysłami, centralne mechanizmy muszą dostosować się do zmniejszenia informacji sensorycznej lub rozwiązać konflikt sensoryczny poprzez zmianę wagi napływających informacji sensorycznych, bardziej polegając na dostępnych i dokładnych źródłach sensorycznych (Horak, Shupert i Mirka, 1989; McCollum, Shupert i in., 1996).
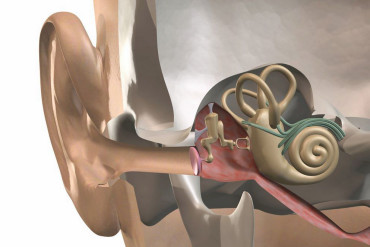
Aferentne bodźce przedsionkowe dostarczają bezwzględnych informacji dotyczących orientacji ciała, natomiast dane wzrokowe i proprioceptywne dostarczają względnych informacji o orientacji ciała (w odniesieniu do otoczenia wizualnego i względem płaszczyzny podparcia).
Na twardej powierzchni zdrowe osoby polegają w 70% na informacjach somatosensorycznych, w 20% na informacji z układu przedsionkowego, w 10% na informacji wzrokowej. W przypadku niestabilnej powierzchni sytuacja ta ulega zmianie. Wówczas osoby zdrowe w 60% polegają na informacji z układu przedsionkowego, w 30% na informacji wzrokowej i w 10% na informacjach somatosensorycznych (Peterka i in., 2004).
Informacje proprioceptywne charakteryzują się najkrótszym opóźnieniem, ponieważ ich szlaki monosynaptyczne mogą przetwarzać informacje z prędkością 40-50 ms (Campbell S.A., 2007). Informacja wzrokowa jest stosunkowo wolna, a opóźnienie czasowe dochodzi nawet do 150-200 ms. Gabor S. (2009), Nijhawan R. (2008) uważają, że opóźnienia w przetwarzaniu przedsionkowym znajdują się gdzieś pomiędzy przytoczonymi skrajnościami (Fitzpatrick R., McCloskey D.I., 1994).
Kompensacja somatosensoryczna pod postacią laski trzymanej w ręce i mającej kontakt z podłożem może być użyta do skrócenia średniego opóźnienia reakcji posturalnych, celem zapobiegania poślizgnięciu się lub potknięciu (Dickstein R. i in., 2003).
Informacja skórna pochodząca z kontaktu palca ze stabilną powierzchnią może być bardziej wydajna niż wzrokowa w przypadku stabilizacji wychwiań pozycyjnych (Ieka Lackner J.R., 1994). Z tego względu urządzenia i przybory pomocnicze zmieniają zarówno biomechaniczne, jak i sensoryczne ograniczenia posturalne.
Strategie motoryczne - co to jest?
Strategie motoryczne służą do organizowania i kontrolowania pozycji i ruchu ciała w przestrzeni.
Strategie proaktywne to antycypacyjne korekty postawy (anticipatory postural adjustments; APA), które zachodzą przed pierwotną aktywnością agonistów w celu ustabilizowania postawy przed rozpoczęciem ruchu dowolnego lub w przypadku spodziewanych utrudnień, np. gdy stojąca osoba szybko porusza ramieniem, jako pierwsze aktywowane są mięśnie kończyn dolnych, które stabilizują ciało przed wychwianiem (Belenkii i in., 1967; Bouisset i Zattara, 1981). Wzorce aktywności mięśni są podobne do tych dla reaktywnej kontroli postawy i zależą od kierunku, prędkości i siły planowanego ruchu. Antycypacyjna korekta postawy pojawia się wcześnie w rozwoju, dzięki nabywaniu praktyki.
"Strategie reaktywne" stosowane w celu utrzymania równowagi w reakcji na przemieszczanie się powierzchni ku przodowi lub tyłowi są to strategie stawu skokowego i stawu biodrowego (Nashner i McCollum, 1985; Horak i Nashner, 1986).
Strategia stawu skokowego, najbardziej przydatna w przypadku powolnych, niewielkich perturbacji na stałym, równym podłożu, wymaga odpowiedniej informacji somatosensorycznej z powierzchni podparcia w celu aktywacji mięśni oddystalnych doproksymalnych. Strategia stawu biodrowego jest przydatna w przypadku nagłych perturbacji lub ruchów o dużej amplitudzie oraz w warunkach, w których trudno jest wytworzyć duży moment obrotowy w stawie skokowym, np. podczas stania na wąskiej belce lub niestabilnej, uginającej się powierzchni.
Wymaga ona odpowiedniej informacji przedsionkowej i wykorzystuje wczesną aktywację proksymalną okolicy biodra i tułowia. Kiedy zaburzenie posturalne przemieszcza środek ciężkości ciała poza podstawę podparcia stóp, tj. gdy strategia bioder lub stawów skokowych jest niewystarczająca do odzyskania równowagi, stosowana jest "strategia kroczna" ("stepping strategy"), tzn. osoba wykonuje odpowiedni krok (Horak, 1991; Nashner, 1989). Jeśli w zasięgu jest stabilne podparcie (np. ściana, poręcz), stosowana jest "strategia sięgania" ("reaching strategy"), tzn. osoba sięga, aby chwycić i podeprzeć się w reakcji na zaburzenie postawy.
Reakcja mięśni ramienia obserwowana w EMG, odpowiadająca automatycznej reakcji sięgania, pojawia się nawet wcześniej niż reakcja mięśni kończyn dolnych. Po zmianie początkowej pozycji ciała lub warunków podparcia, to samo zaburzenie powierzchni podparcia powoduje aktywację innych grup mięśniowych, np. gdy osoba podpiera się, trzymając się za uchwyt podczas zaburzenia powierzchni, jej automatyczne reakcje posturalne są tłumione w kończynach dolnych, a aktywność posturalna zachodzi pomiędzy powierzchnią kontaktu ciała ze stabilną płaszczyzną, tj. w obszarze ręki i ramienia (Nashner L.M., 1982).
Podobnie osoby, które doznają wytrącenia z równowagi podczas siedzenia na stołku ze zwisającymi nogami, najpierw korzystają z aktywności tułowia, a nie mięśni kończyn dolnych. Należy również pamiętać, że strategie posturalne stają się bardziej wydajne i efektywne w odpowiedzi na powtarzaną ekspozycję, tj. dochodzi do zastąpienia względnie chaotycznej reakcji na wystąpienie destabilizującego bodźca odpowiedzią bardziej precyzyjną i harmonijną (Hirschfeld H., 1994).
Horak i Nashner opisali, że wspomniane reakcje nie były zaprogramowane (wdrukowane), jak ma to miejsce w przypadku odruchów, lecz można je było stopniowo nabywać dzięki doświadczeniu w nowym kontekście środowiskowym. Strategie pojawiające się w każdej sytuacji zależą zarówno od ograniczeń zewnętrznych (tj. narzuconych przez środowisko i konkretne zadanie), jak i wewnętrznych (tj. narzuconych przez system biomechaniczny i nerwowy danej osoby).
Do kontroli posturalnej wymaganych jest wiele zasobów poznawczych. Konieczne są zwiększone zasoby uwagi ze względu na wzrost złożoności zadania ruchowego lub posturalnego. Lokomocja nie jest wówczas automatyczna, wymaga uwagi, której zasoby są ograniczone (Shumway-Cook A. i in., 2006).
Przeciążenie ograniczonych zdolności uwagowych może doprowadzić do interferencji pomiędzy zadaniami i tym samym pogorszenia wykonania obu z nich (Springer S. i in., 2006). Pierwsza hipoteza Shumway-Cook (1997) sugeruje, że osoby znajdujące się w sytuacji zwiększonego ryzyka doznania obrażeń będą traktować priorytetowo kontrolę postawy lub stabilność chodu względem drugiego wykonywanego jednocześnie zadania w celu zmniejszenia prawdopodobieństwa upadku i doznania obrażeń.
Zaburzenia równowagi - jakie mogą być przyczyny?
Każdy z nas doznał wielu upadków w trakcie swojego rozwoju. Tym nie mniej upadek w życiu dorosłym zawsze wywołuje w nas spekulacje na temat domniemanej przyczyny. Czy podłoga była śliska? Czy źle oceniliśmy odległość? Czy byliśmy zajęci czymś innym? Czy nie jesteśmy wystarczająco sprawni? Czy zaskoczyła nas zbyt nagła zmiana sytuacji równoważnej?
Bardzo często ignorujemy wczesne wskazówki podpowiadające nam o potrzebie podparcia się na poręczy krzesła, gdy zmieniamy pozycję z siedzącej na stojącą, skorzystania z poręczy schodów, spoglądania w dół podczas chodzenia, konieczności chodzenia z lekkim badaniem stopami podłoża, po którym się poruszamy, itp. Patologia może długo nie objawiać się klinicznie z powodu nadmiarowości (redundancji) informacji dopływających do ośrodkowego układu nerwowego i jego zdolności do przystosowywania się do utraty funkcji do momentu, w którym pacjent nie zostanie czasowo pozbawiony systemu kompensacyjnego.
Czynniki ryzyka upadków można sklasyfikować jako wewnętrzne (związane ze starzeniem się, np. osłabieniem siły, utratą czucia itp.) lub zewnętrzne (związane z warunkami panującymi w otoczeniu, np. śliskimi powierzchniami, ciemnością itp.). Pacjenci z ubytkami somatosensorycznymi, np. w przypadku neuropatii cukrzycowej, mogą nadmiernie polegać na informacji wizualnej, w związku z czym stają się mniej stabilni, gdy zamykają oczy lub idą w ciemności.
Dziecko z dystrofią mięśniową Duchenne’a stara się utrzymać równowagę w pozycji pionowej dzięki zwiększonej lordozie lędźwiowej i zgięciu podeszwowemu stóp, aby poprzez te strategie utrzymać rzut środka ciężkości ciała w obrębie płaszczyzny podparcia. Osoba z obustronną amputacją powyżej stawów kolanowych będzie miała lepszą równowagę z krótkimi kikutami niż z długimi protezami AK (kolano-staw skokowy), ponieważ środek ciężkości (w okolicy kręgów krzyżowych w normalnej pozycji pionowej) będzie bliżej płaszczyzny podparcia.
U pacjentów z zaburzeniami neurologicznymi może wystąpić:
• nieprawidłowa koordynacja czasoprzestrzenna automatycznych reakcji posturalnych,
• nieodpowiednia antycypacyjna regulacja posturalna podczas przejść pomiędzy ruchami, np. niezdolność do przemieszczenia ciężaru tułowia i kończyn górnych do przodu na stopy przed podniesieniem się z pozycji siedzącej,
• odwrócenie normalnej oddystalnej doproksymalnej sekwencji czasowej aktywacji mięśni posturalnych, powodujące nadmierny przeprost kolan i bioder, co może być przykładowo związane z bardziej zaawansowanym wiekiem (Wollacott M.H., 1989), przebyciem udaru mózgu (Di Fabio R.F., 1990) lub porażeniem mózgowym (Nashner, 1983),
• nadmierna koaktywacja mięśni w odpowiedzi na "przesuwanie się" powierzchni podparcia, np. w chorobie Parkinsona; pacjenci cierpiący na tę jednostkę chorobową podczas wychwiania do przodu wykazują normalne opóźnienie (latencję) w reakcji agonistów, której jednakże towarzyszą dodatkowe potencjały w mięśniach antagonistycznych, zwiększające sztywność, jednak nieskuteczne w przypadku sił kierunkowych, więc utrudniające zachowanie równowagi.
Równowaga - najważniejsze czynniki
• Biomechanical factors & Base of support (czynniki biomechaniczne i płaszczyzna podparcia)
• Alignment of body segments (ustawienie liniowe segmentów ciała)
• Limits of Stability (granice stabilności)
• Anticipatory postural adjustment/Automatic postural reactions (antycypacyjna korekta posturalna / automatyczne reakcje posturalne)
• Sensory feedback & Reweighting (sensoryczne informacje zwrotne i zmiana wag informacji)
• Cognition (czynniki poznawcze)
• Environmental factors (czynniki środowiskowe)
Rozważania fizjoterapeutyczne na temat zaburzeń równowagi
Cele fizjoterapii powinny być ukierunkowane na specyficzne zaburzenia konkretnego systemu oraz powinny być realizowane w kontekście ról pacjenta, jakie odgrywa on w życiu codziennym. Testy dedykowane diagnostyce patologii strukturalnej nie są przydatne do diagnozy funkcjonalnych zaburzeń równowagi. Specyficzne dla systemu określenie zaburzeń równowagi jest możliwe dzięki procedurze oceny klinicznej zwanej BESTest.
Kontrola równowagi jest umiejętnością. Zróżnicowanie zadań, powtarzanie i informacja zwrotna o stopniu wykonania zadania są ważnymi regułami rozwoju tej umiejętności. Istotą treningu równowagi jest ćwiczenie zadań o wzrastającym poziomie trudności: od stałych, przewidywalnych okoliczności, tj. opracowywania strategii proaktywnych, do mniej przewidywalnych okoliczności, tj. opracowywania strategii reaktywnych.
Można tego dokonać poprzez trening:
» z podparciem, częściowym podparciem, aż do całkowitego braku podparcia;
» na twardej, stabilnej powierzchni, a następnie przejście na twardą oraz niestabilną miękką powierzchnię (np. materac z pianki);
» wykorzystujący zmianę kierunku, tj. do przodu, na boki, do tyłu, rotację;
» uwzględniający zmiany prędkości;
» angażujący pokonywanie przeszkód, podwyższenie stopnia, na który należy wejść, wymagający pokonywania schodów, pochylni, zboczy itp.;
» systematycznie zmieniający dostępność informacji sensorycznych, np.: od pełnej dostępności bodźców wzrokowych, przez ograniczenie możliwości korzystania ze wzroku, po całkowite odcięcie informacji wizualnej i chodzenie po różnych powierzchniach o różnej fakturze itp.;
» zawierający przejście od pojedynczego zadania do zadania podwójnego, a następnie złożonego, np. noszenie przedmiotów z obserwowaniem przedmiotów trzymanych w ręku;
» wykorzystujący dodawanie zadania poznawczego o rosnącym poziomie trudności, np. czytanie znaków od strony lewej i prawej, nazywanie obiektów, recytowanie wierszy, liczenie wstecz, dodawanie liczb itp.
Ważne informacje na temat utrzymywania równowagi
• Wykorzystanie informacji zwrotnej, dostarczanej przez lustro, oraz wagi pomaga w ponownym odzyskaniu prawidłowego rozłożenia ciężaru i korekcji równowagi.
• Także ćwiczenia na platformie stabilometrycznej, z wykorzystaniem błysków świateł generowanych na ekranie komputera, pomagają w poprawie kontroli kierunkowej i granic stabilności.
• Odpowiednie ustawienie osiowe obszarów ciała, niezbędne dla stabilności posturalnej i równowagi ruchowej, jest możliwe tylko przy braku jakichkolwiek deformacji stawów i odpowiedniej sile mięśni. Ćwiczenia mające na celu skorygowanie deformacji stawów i wzmocnienie mięśni są warunkiem koniecznym, którego nie wolno ignorować.
• Poprawa proksymalnej stabilizacji kończyn i tułowia jest istotna dla ograniczenia ataksji tułowia i kończyn u osób z ataksją móżdżku. Dla tej grupy pacjentów wskazane są ćwiczenia na materacach, techniki PNF i joga.
• Podejścia do poprawy propriocepcji polegają na: mechanicznej stymulacji powierzchni stawów, mięśni i ścięgien, wibracji przykładanej do mięśni i ścięgien, zastosowaniu technik proprioceptywnej facylitacji nerwowo-mięśniowej (PNF), rytmicznej stabilizacji, powolnych technik zwrotności ciągłej, ćwiczeń oporowych, treningu chodu na różnych powierzchniach i nawierzchniach (twardych, miękkich, pochylonych) z otwartymi i zamkniętymi oczami, ćwiczeniach pliometrycznych, ćwiczeniach równowagi z piłką i na minitrampolinie.
• Przykładami ćwiczeń usprawniających antycypacyjną korektę postawy są: chodzenie po znacznikach naniesionych na podłogę, przenoszenie ciężaru ciała, używanie lekkiego dotyku, stosowanie zewnętrznych wskazówek, np. liny rozłożonej na podłodze, która następnie zastępowana jest jedynie wyobrażaniem jej sobie (Jacobson i in., 2006). Uderzanie stabilnie zamocowanego, ciężkiego worka bokserskiego jest bardziej przewidywalne, i w związku z tym ćwiczy zdolności antycypacyjne, niż kołysanie lżejszą torbą, co wymaga w większym stopniu strategii reaktywnej (King i Horak, 2009).
• Użycie pomocy w chodzeniu w postaci laski, trójnogu lub kuli bardzo często nie jest łatwo akceptowane przez pacjentów i osoby starsze; alternatywą może być długi parasol.
Wnioski
Praktyka kliniczna powinna być spójna z badaniami i rozumieniem normalnej i zaburzonej kontroli posturalnej oraz równowagi z uwzględnieniem roli ograniczeń środowiskowych napotykanych w codziennym funkcjonowaniu. Należy pamiętać, że człowiek najbardziej jest motywowany celami funkcjonalnymi: chęcią samodzielnego jedzenia, ubierania się, chodzenia, podróżowania, robienia zakupów itd.
Trening równowagi nie powinien ograniczać się do instruktażu, wykorzystania przyrządów i sytuacji klinicznych (settingu terapeutycznego), lecz powinien zostać zorientowany na zadania związane z codziennym życiem w domu i funkcjonowaniem w społeczeństwie. Kontrola równowagi jest umiejętnością. Zróżnicowanie zadań, powtarzanie i informacja zwrotna o stopniu wykonania zadania są ważnymi regułami rozwoju tej umiejętności.